Moon Monday #129: ispace lander’s crash site and cause, mission updates, and more

ispace Japan’s first Moon lander crashed less than 7 kilometers from its target site
Just a month after ispace Japan’s first lunar lander Hakuto-R failed to touchdown on the Moon on April 25, the company has identified from telemetry data the key causes of the M1 surface mission failure, and has shared it publicly via a press release and an unusually candid and detailed media briefing.
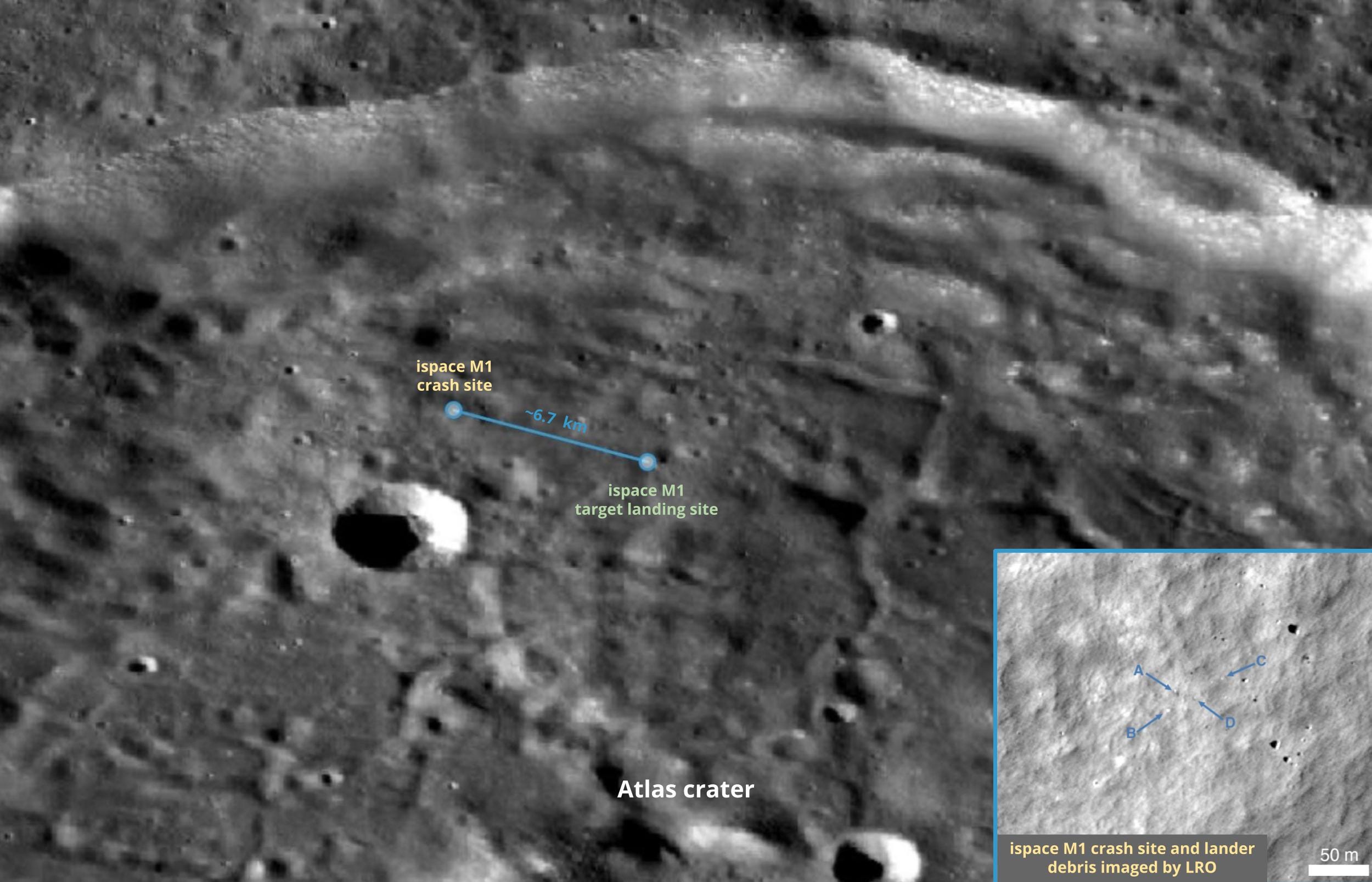
ispace says as the lander passed over the rim of the Atlas crater, so as to approach its target landing site at 47.5°N, 44.4°E lying within the crater, its laser rangefinder correctly reported to the onboard software an increased elevation of roughly three kilometers corresponding to the crater’s depth. But the software, designed to filter out certain abrupt altitude values to keep the lander’s motion stable against possible hardware failures, rejected the measurement as erroneous. The lander, thinking it was closer to the surface than it really was, continued decelerating slowly at less than 1 meter/second and eventually ran out of fuel while still at around 5 kilometers altitude. Presumably, the software kept rejecting the repeatedly higher altitude measurements all this while because it determined the rangefinder to have failed. The lander then faced an accelerated free fall crash under the Moon’s gravity. A motivated group of amateur radio observers monitoring the lander’s radio transmissions independently concluded the free fall state in mid-May.
ispace CTO Ryo Ujiie said during the media briefing that the software issue wasn’t identified and fixed during simulation testing of the lander descent—which is based on real terrain data—because the company chose the targeted landing site just a month before the December 2022 launch. While ispace did perform extensive testing for the previous landing site lying in the plains of Lacus Somniorum, which was selected two months before the mission’s critical design review in February 2021, its scenarios were evidently insufficient to deal with the terrain encountered at Atlas.
In a world first, ispace has gotten insurance from Mitsui Sumitomo last year. It’s supposed to cover several possible failures from launch through landing but ispace is waiting to hear back on the claim. In any case, ispace will incorporate necessary software and simulation testing related changes for their M2 mission, whose flight lander is now being assembled for a 2024 launch.
NASA’s Lunar Reconnaissance Orbiter (LRO), thanks to its preplanned arrangements with ispace to image the landing region and adjacent areas on April 26, captured photos showing lander debris in a now-higher-reflectance area at 47.581°N, 44.094°E. Using the amazing LROC Quickmap, I get an estimated range between ispace’s target landing site and crash site to be ~6.7 kilometers.
In contrast to LRO’s quick find of the ispace lander is the crash of ISRO’s Chandrayaan 2 lander in September 2019, wherein it took three months for NASA to locate the spacecraft’s debris because ISRO didn’t share any substantial data. Again, the good communications transparency demonstrated by ispace must serve as an example for tax-funded government space agencies to take cues from, as should it for the upcoming NASA-funded, competing, private CLPS landers.
Many thanks to Epsilon3 for sponsoring this week’s Moon Monday.
Mission updates
- ISRO’s Chandrayaan 3 Moon lander, aiming to be launched in the second week of July, arrived at the Sriharikota spaceport on May 26 to begin launch preparations, Sidharth MP reports.
- In a post on the official CLPS Blog, NASA reveals why it changed the landing site of Intuitive Machines’ first CLPS lunar lander—carrying six agency payloads—from a near-equatorial location to besides the Malapert A crater at 80°S. NASA says it’s to fulfill “a need to learn more about terrain and communications near the lunar South Pole.” This seems likely to be in the context that near-polar regions—especially elevated ones like Malapert A—have better Earth visibility over the lunar year than sites with even higher latitudes. That’s ultimately because the Moon’s wobbling makes the latter places be out of Earth’s line of sight more often. Jeff Foust has previously noted that mission modifications stemming from the landing site change increased the company’s contract value from $77 million to $116.3 million.
- Applying thermal protection to the cone-shaped stage adapter of NASA’s SLS rocket takes several months.. which is now done for the Artemis III mission to land astronauts on the Moon mid-decade. Well, at least it’s the last such adapter to be dealt with for Artemis as NASA will switch crew launches to SLS’ more cargo capable Block 1B variant beginning with Artemis IV.
- NASA is seeking industry proposals by July 10 to build and launch before end of decade the Lunar Terrain Vehicle (LTV), which will be a versatile crew-capable and tele-operable robotic rover to be used across Artemis missions for at least 10 years. NASA expects the delivered LTV to demonstrate successful operations on the Moon’s south pole before crew can use it starting 2029 with Artemis V. Relatedly, Lunar Outpost recently switched sides from Northrop Grumman to Lockheed Martin for the LTV bid. Lunar Outpost is providing robotic rovers on two upcoming CLPS missions, one to the lunar south pole and another to the swirl of Reiner Gamma. Also competing for LTV will be Leidos-Dynetics in partnership with NASCAR. NASA will announce the LTV contract award this November.

More Moon
- In a scathing report published on May 25, NASA’s Office of Inspector General criticizes the agency’s handling of SLS rocket engine contracts to Aerojet Rocketdyne and Northrop Grumman, who provide the vehicle’s RS-25 engines and the twin boosters respectively for crewed Artemis missions. The inspector says that not only has there been a $6 billion cost increase and an over six-year delay in receiving said hardware for the designated initial Artemis missions but that “NASA and its contracts will continue to exceed planned cost and schedule, resulting in a reduced availability of funds, delayed launches, and the erosion of the public’s trust in the agency’s ability to responsibly spend taxpayer money and meet mission goals and objectives—including returning humans safely to the Moon.”
- Australia will establish a new ground station to support NASA’s Artemis missions. Tangent: Intuitive Machines will utilize commercial ground station services from CSIRO’s high-bandwidth capable Parkes disk in Australia for all of its robotic lunar missions.
- Japan-based GITAI has raised $29 million—adding to their previous $17 million funding from 2021—to develop a lunar rover with a two-meter inchworm robotic arm, Jason Rainbow reports. GITAI is also expanding its US presence, and has been operating prototypes in the Mojave desert to test various activities related to assembling parts of lunar habitats ahead of an ambitious 2026 launch to such demonstrative end.
- The US National Geospatial-Intelligence Agency is working with NASA, the US Geological Survey, the US Space Force, and the US Space Command to develop a positioning and navigation system for the Moon that would provide more accurate references to lunar missions than NASA’s already in-progress LunaNet architecture, Sandra Erwin reports.