The bevy of rovers heading for the Moon
A look at all the big and small mobile robots that will explore the lunar surface over the next five years.

The next five years of exploring our Moon will not just be marked by the upcoming armada of robotic landers but also the sheer diversity of mobile explorers they’ll deploy. Here’s a look at all the mobile robots from many countries that will explore the Moon’s surface soon, from micro-rovers to hoppers, and sophisticated scientific explorers to crewed vehicles.
A small army of mobile explorers
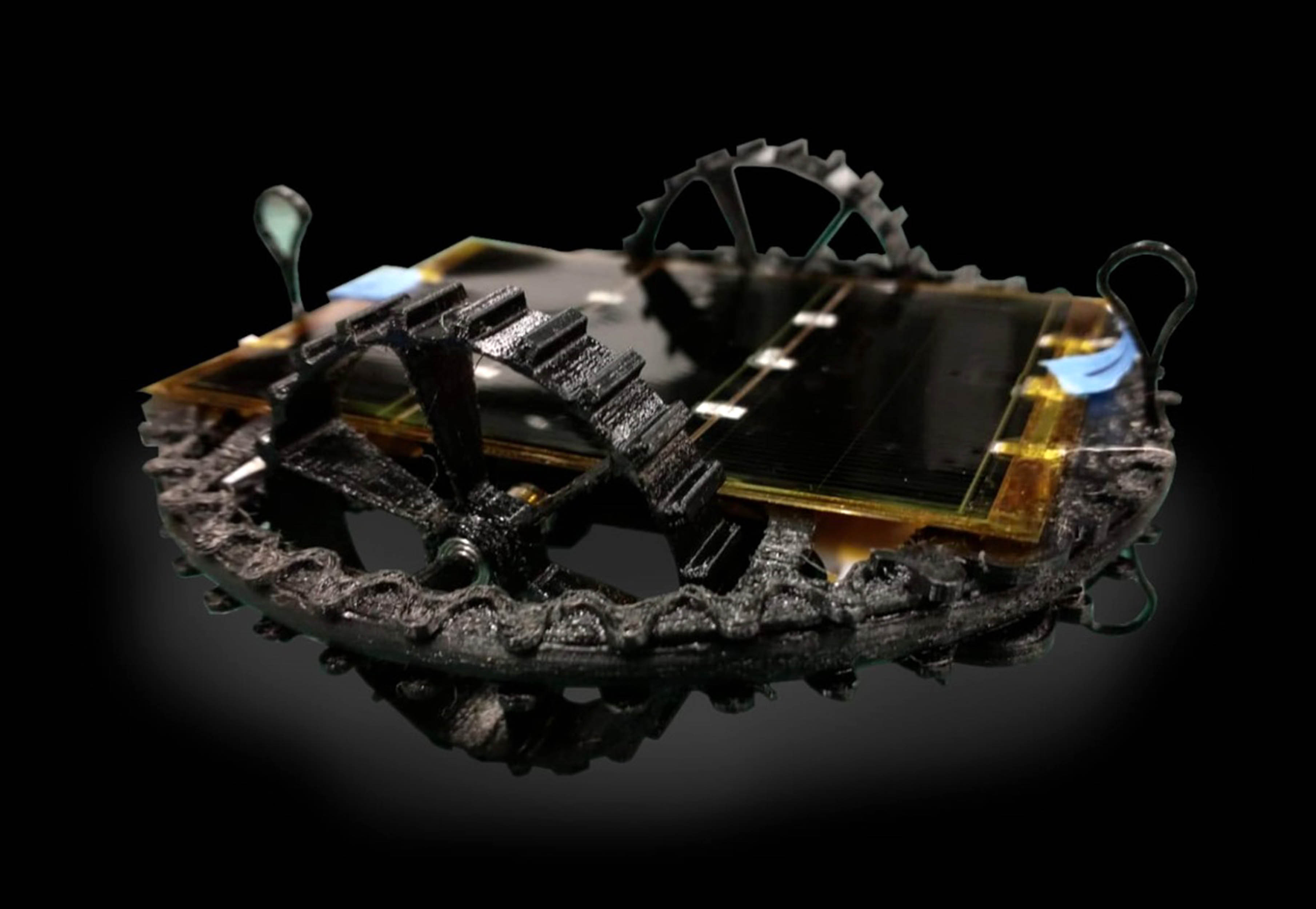
Astrobotic’s first lunar lander in Q1 2023, part of NASA’s CLPS program, will touchdown in a lunar lava plain and then deploy a small army of rovers. There’s the 0.5-kilogram single-axis rover Yaoki from Japanese company Dymon, designed to keep running even if it falls over. Then there’s the 1.3-kilogram Asagumo spider-like walking robot from UK-based Spacebit, and the 1.8-kilogram Iris rover designed by students at Carnegie Mellon University.
Astrobotic’s lander will also deploy five tiny autonomous rovers collectively called COLMENA, representing Mexico’s first Moon mission. Weighing about 60 grams and spanning 12 centimeters across each, they really are tiny. COLMENA aims to demonstrate how such small robots working in tandem can survive and navigate the harsh lunar environment.
The most crucial contributions from these small rovers won’t be the images they take but rather how their traverses will help us better understand the mechanical properties of the lunar soil, something critical for both future missions and lunar science.
Rovers by Japan, UAE and India
ispace Japan’s first Moon landing mission launching at the end of this year will deploy two rovers. One of them is a tennis-ball-sized 250-gram rover built by Japanese space agency JAXA. Once on the Moon’s surface, the spherical robot will split in half to use its two hemispheres as wheels. JAXA aims to use information learnt about the mechanics of the lunar soil from this rover’s traverses to aid the design of an autonomous, crewed pressurized rover, which they’re jointly researching with Toyota.

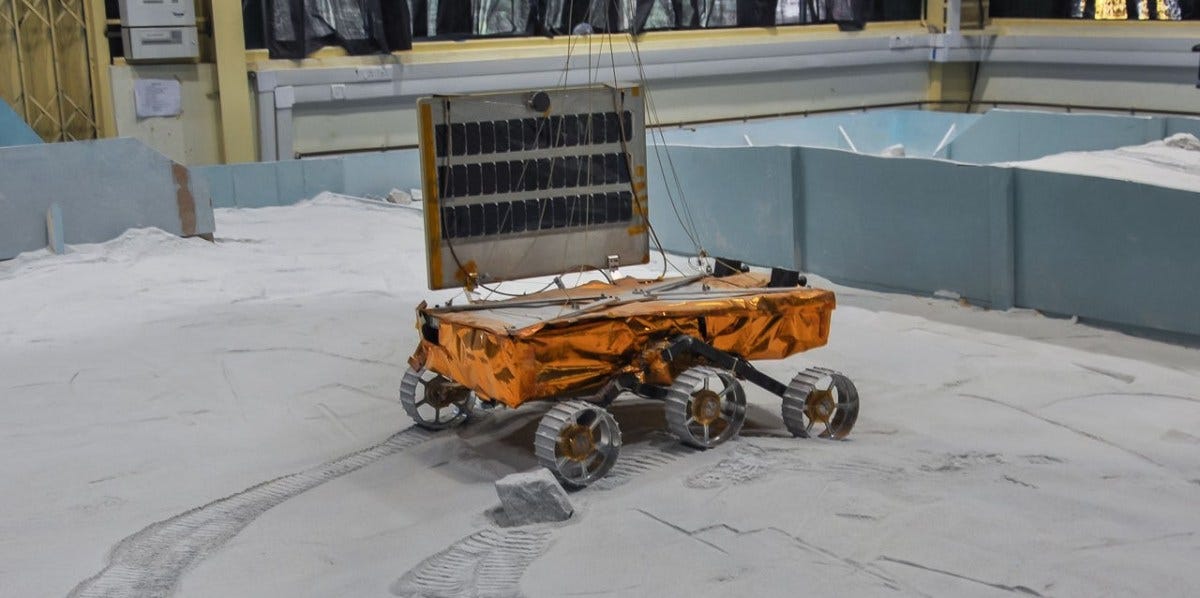
The other mobile explorer ispace’s lander will deploy is the UAE’s 10-kilogram Rashid rover. The French space agency will provide two high-resolution cameras for the rover. One camera will be on the rover’s mast to provide panoramic views while the other will be rear-mounted to analyze drive tracks as well as infer wheel sinkage and mechanical properties of the soil. UAE might send another rover on Israeli company SpaceIL’s second Moon landing attempt or onboard China’s Chang'e 7 lander in 2024.
ispace’s second Moon landing mission in 2024 will feature their indigenously built micro-rover to explore the Moon’s surface. ispace’s European arm is developing the rover, aided by funding from the Luxembourg Space Agency under an ESA contract.
Chandrayaan 3, India’s second attempt to land on the Moon after Chandrayaan 2’s surface mission failed in 2019, will launch in 2023. It will have a similar lander and rover, and the landing region is expected to be a near-polar lunar highland too. As such, the rover will have a pair of spectrometers to determine what the ancient lunar crust is made of.
Testing promising technologies
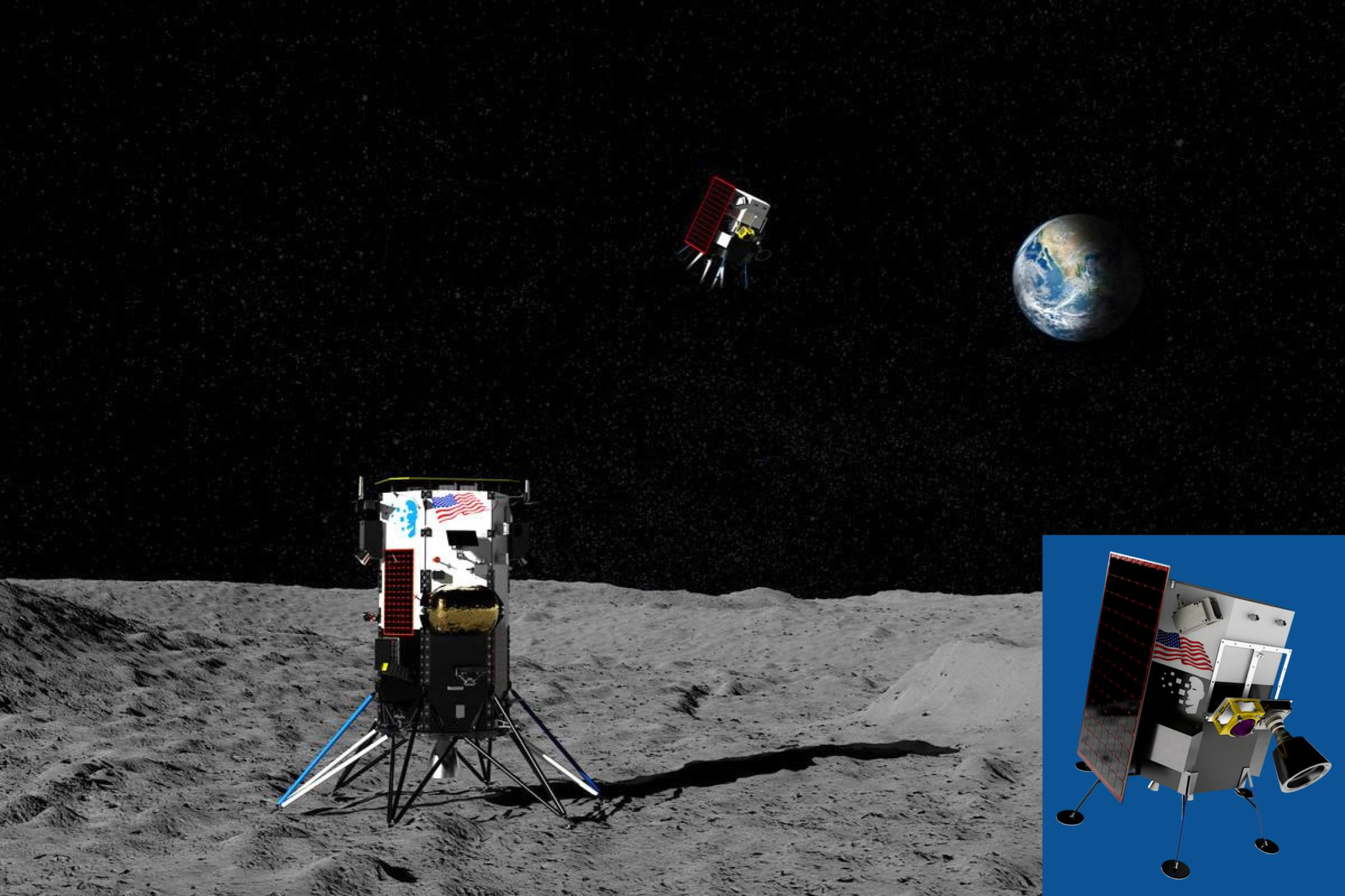
Intuitive Machines’ second Moon landing mission, launching in 2023 and also part of NASA’s CLPS program, will deploy two mobile explorers on the Moon’s south pole. The first is a rover built by Lunar Outpost to test the first 4G/LTE communications system on the Moon. The aim is to see if we can get high-throughput, long-range, and low-latency communications on the lunar surface necessary for having a sustainable presence in the future.
The mission’s second mobile explorer will be a hopper called Micro-Nova, supported by a $41.6 million NASA contract. It will jump around on the Moon taking high-resolution images of the surface under its flight path. In future missions, Micro-Nova can potentially also fly into lava tubes, permanently shadowed regions, and other such areas practically inaccessible by traditional landers and rovers.
The lunar water studying VIPER
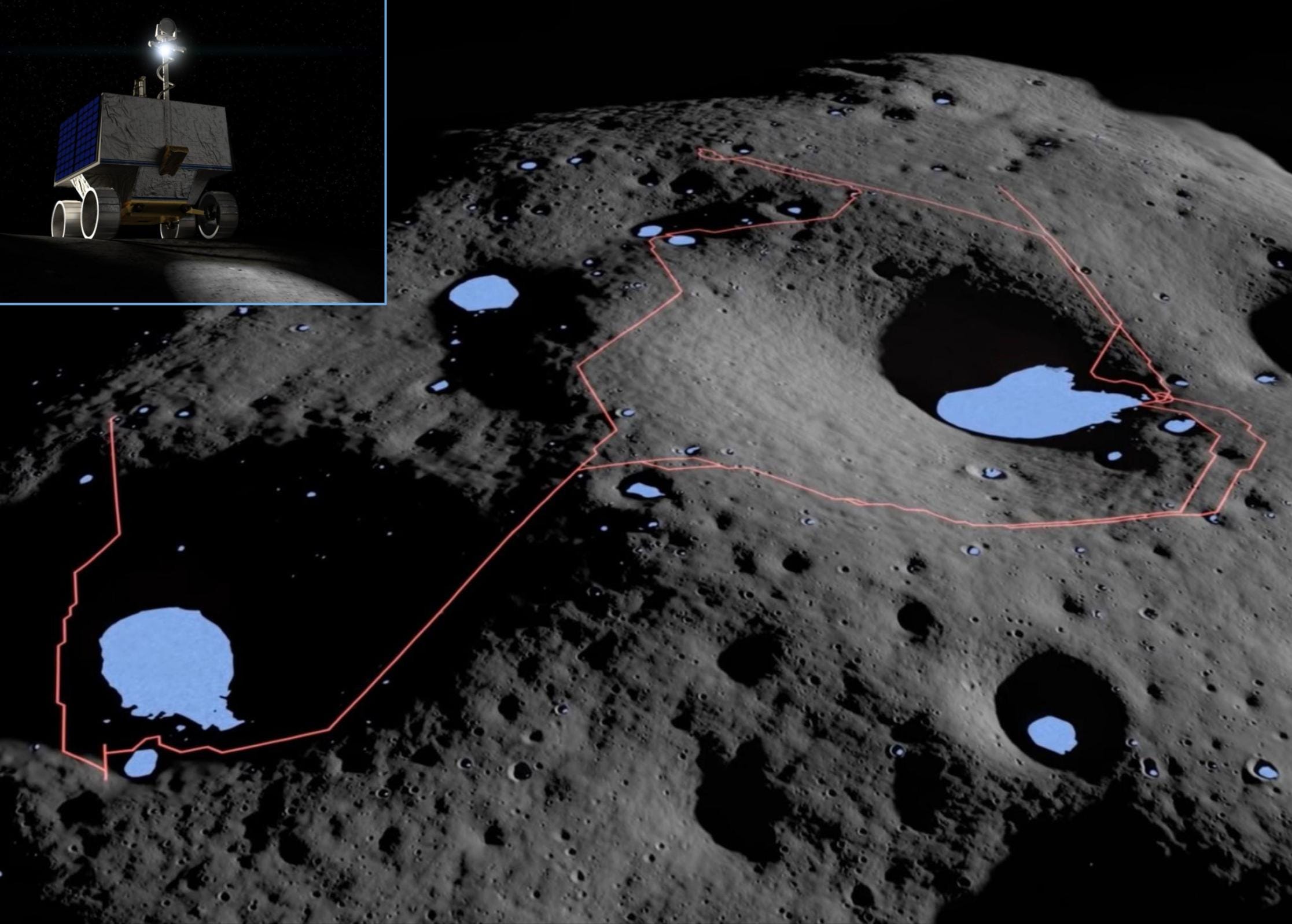
NASA’s VIPER rover landing on the Moon’s south pole in November 2024 as part of NASA’s CLPS program will explore areas in and around permanently shadowed regions for over 100 days. It will use a drill and three instruments to unravel the nature of the Moon’s water ice deposits, assess their resource potential, and determine how accessible they are. This will help us plan future sustainable crewed missions.
Before VIPER launches however, NASA aims to reduce the mission’s risk by sending versions of its instruments on prior missions. One such case is Astrobotic’s suitcase-sized 13-kilogram MoonRanger rover, which boasts autonomous navigation and mapping capabilities. NASA is leveraging the same by putting onboard a variant of VIPER’s neutron spectrometer to detect signs of water ice below the Moon’s surface. Originally scheduled to be delivered on a Masten CLPS lander, the rover will need to find another ride with Masten recently filing for Chapter 11 bankruptcy.
Information about the exact nature of water on the Moon’s poles is so crucial from both a scientific and exploratory standpoint that other nations are also planning missions like VIPER, the earliest one being the joint Japanese-Indian LUPEX rover targeting a post-2024 launch. JAXA is building the 350-kilogram rover, and India’s space agency ISRO is developing the lander which will deliver LUPEX to the Moon’s south pole.
China will launch the Chang’e 7 mission around 2024. It will consist of an orbiter and a lander, the latter of which will likely deploy a rover and hopper to map resources on the Moon’s south pole near the landed region.
Exploring a magnetic swirl
Intuitive Machines’ third (CLPS) Moon mission will land in the magnetic swirl of Reiner Gamma in 2024. The mission’s primary payload suite Lunar Vertex is a collection of spectrometers and magnetometers on the lander and a rover. The rover will drive up to two kilometers over 13 Earth days, exploring at least one bright and dark section of Reiner Gamma. It will study the swirl’s composition and map the strength & direction of magnetic fields on the surface.
The mission will help us better understand the Moon’s past magnetic field as well as the effects of solar wind and bombarding micrometeorites on planetary bodies across the solar system. The lander will also deploy NASA’s four small CADRE rovers, which will autonomously navigate the landed region and collectively better map it than a single rover can.
First Canadian and Australian Moon rovers
After requesting proposals in 2021 from Canadian companies to build a rugged lunar rover, the Canadian Space Agency (CSA) awarded MDA and Canadensys detailed design study contracts in the same year for a mission to the Moon’s south pole. An interesting and challenging requirement is for the rover to survive an entire lunar night, and be able to explore water ice and other resources in permanently shadowed regions. CSA will select either of the two companies to build the rover for the actual mission, which will launch in 2025 onboard a NASA-funded CLPS lander.
In October 2021, Australia announced its first Moon mission. Their space agency will fund a winning proposal by an Australian industry consortia this year to develop a lunar rover for a maximum cost of (Australian) $50 million. The sub 20-kilogram rover will hitch a ride to the Moon in 2026 or later onboard a NASA-funded CLPS lander as well. The semi-autonomous rover will explore the Moon’s south pole, and retrieve lunar soil for the lander, where a NASA-operated system will practice extracting oxygen from it. This mission will thus demonstrate a key step towards establishing a sustainable human presence on the Moon.
Roving on a volcanic dome
In September 2021, NASA asked U.S scientists to propose science instrument suites worth up to $40 million to fly on a 2025 CLPS mission landing on one of the two volcanic domes of Gruithuisen. It would greatly expand our knowledge of the Moon’s volcanic past because the domes are made up of silicic material instead of basalt, the latter of which is more common. The mission will have a rover capable of traveling up to 500 meters from the landing site. Scientists could propose up to 15 kilograms of instruments on the rover.
The rover Artemis astronauts will drive on the Moon
In August 2021, NASA revealed more details on its plan to purchase a commercial rover which Artemis astronauts will drive on the Moon later this decade. Since NASA intends to sustain its return to the Moon, the agency desires the Lunar Terrain Vehicle (LTV) to be far more capable than the Lunar Roving Vehicle (LRV) used by Apollo astronauts, and more sophisticated than even the current crop of Mars rovers.
The LTV, launching no earlier than 2028, will be an all-electric rover that two suited astronauts can drive on the Moon for up to 20 kilometers without a recharge. Unlike Apollo, the LTV will be used across multiple Artemis missions for at least 10 years. This means the LTV must survive frigid night-time temperatures and navigate the challenging rugged terrain at the Moon’s south pole. It can also explore permanently shadowed regions for up to two hours.
When there aren’t any crewed missions to use the LTV, the rover will be remotely operated to transport up to 800 kilograms of cargo between desired points on the Moon. While we wait for NASA to solicit LTV proposals from U.S. companies sometime this year, Lockheed Martin and one by Northrop Grumman have already revealed their concepts.

The LTV is just one of the two rover types part of NASA’s Artemis Base Camp, which aims to build the infrastructure necessary for at least a few astronauts to live long-term on the Moon. The other rover is a pressurized, habitable one, which would enable astronauts to explore the Moon’s south pole for up to 45 days at a time. NASA will presumably solicit proposals for this even more advanced vehicle at a later stage.
After an excruciatingly long abandonment of over three decades, entities globally pushing the boundaries of planetary surface exploration on scales big and small seems like a worthy return to our Moon.
A crispier version of this article has been co-published with The Orbital Index, my favorite technical space newsletter. I greatly admire the persistence and quality of work Andrew and Ben display in each of their weekly issues, and am happy to have contributed to the newsletter I’ve come to rely on for years now.
→ Browse the Blog | About | Donate ♡