How India’s Chandrayaan 2 orbiter helped Japan nail SLIM’s Moon landing, and where Artemis comes in


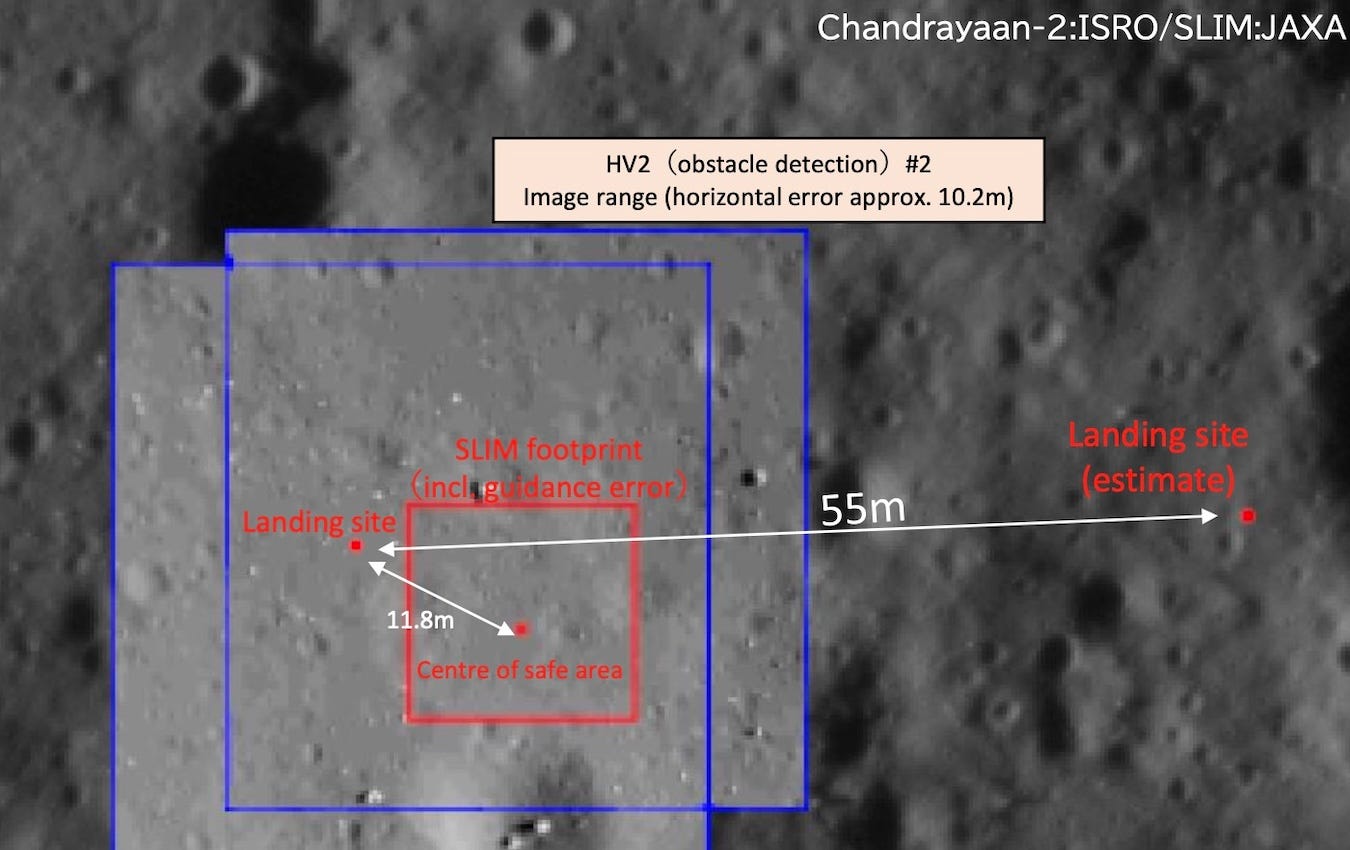
On January 19, the Japanese space agency JAXA’s SLIM lander touched down on the Moon merely 55 meters away from the center of its target spot, making it the most precise robotic planetary landing in history. A key part of how it achieved this feat is a tale of collaboration between JAXA and ISRO.
At the heart of SLIM’s precision landing ability is a technology JAXA calls “vision-based navigation”. During its descent, SLIM snapped images of the Moon and compared them to preloaded onboard orbital maps within just a few seconds to determine where it is and where it needs to go. These maps come from NASA’s Lunar Reconnaissance Orbiter (LRO), ISRO’s Chandrayaan 2 orbiter, and JAXA’s own SELENE craft, each uniquely useful at various heights.
In a post-landing media release, SLIM’s Project Manager Shinichiro Sakai mentioned that the mission team used Chandrayaan 2’s imagery not just for the lander’s final descent phase but also to select the final target landing area pre-launch. This is because Chandrayaan 2’s Orbiter High Resolution Camera (OHRC) boasts an imaging resolution of 0.25-0.30 meters/pixel, which is roughly twice LRO’s finest.
“JAXA sent us a request in 2021 to image SLIM’s landing site, and so we planned an orbital passover of the Chandrayaan 2 orbiter to acquire OHRC images for them,” says Amitabh Singh, head of ISRO’s Planetary and Space Science Data Processing Division and a lead scientist on the OHRC team. Later in 2023, ISRO provided JAXA with more images of the landing site from different sun angles, which helped engineers tune SLIM’s algorithms to instantly identify boulders and other hazards.
Even though most modern robotic landers, including most recently India’s own Chandrayaan 3 and the US-based Intuitive Machines’ Odysseus lander, can find a good landing spot on their own during the final phase of a landing, the lack of an apt last-mile map affects the landing precision.
When SLIM was roughly 50 meters above the Moon’s surface, it hovered and identified touchdown hazards below it using vision-based navigation with Chandrayaan-2 imagery. But at this point one of its two main engine nozzles mysteriously detached, and off-center thrust made SLIM go sideways. SLIM’s guidance system identified this anomaly and descended using the hover-phase imagery while continually trying to stabilize its orientation with the other main engine and smaller thrusters. While SLIM’s vertical velocity of 1.4 meters per second on touchdown was well within acceptable bounds, the eastward lateral motion and touchdown orientation weren’t nominal, causing it to flip on the surface with its solar panels facing away from the sun. Even when afflicted, SLIM could see and target a safe spot to touch down upon and manage to avoid a crash.
A helping hand for Artemis
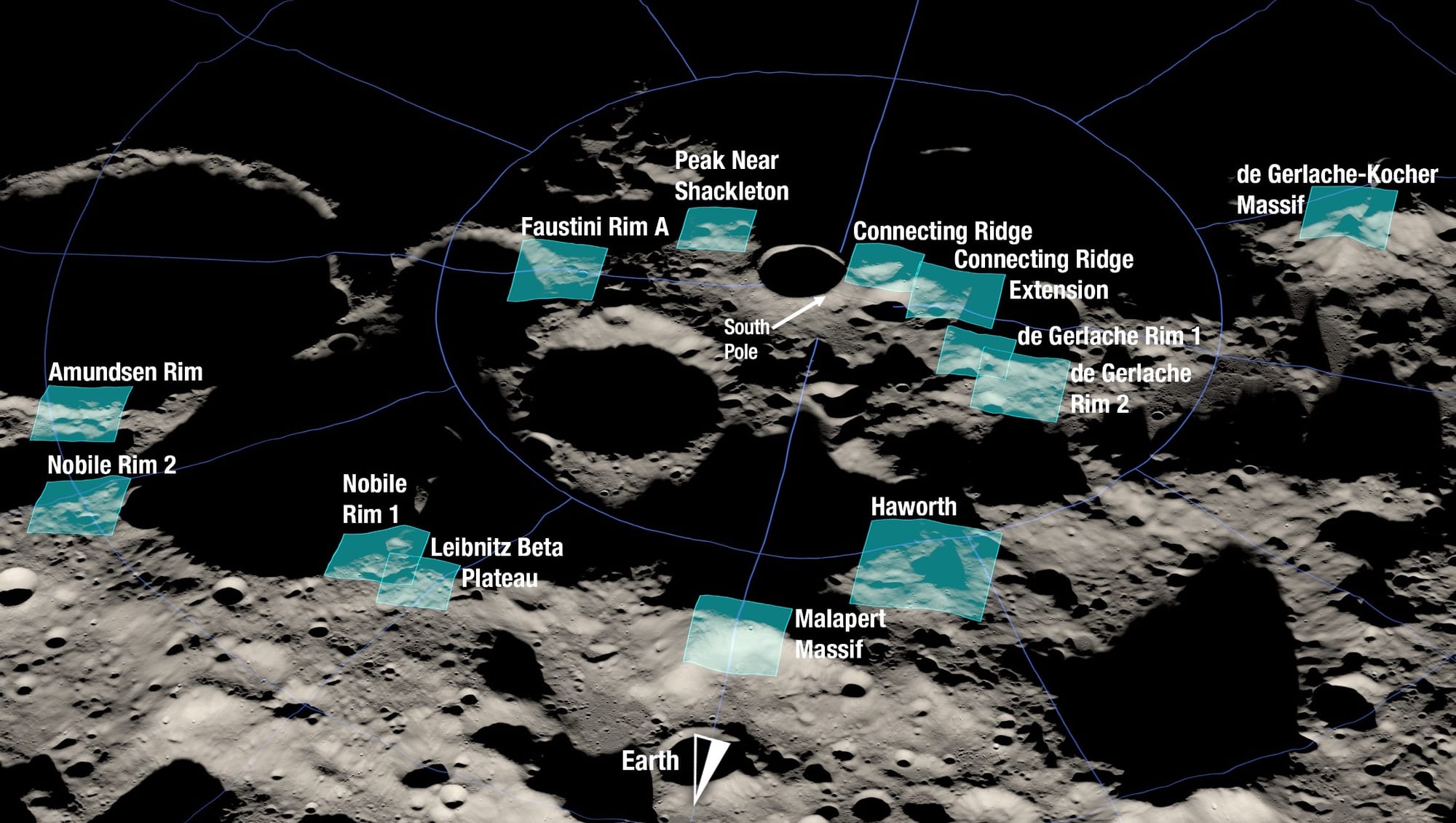
For ISRO, SLIM’s case highlights how Chandrayaan 2 can provide advanced orbital data to help NASA better filter landing zones for the agency’s Artemis program to land humans on the Moon—especially as the 2009-launched LRO gracefully ages. While this has mostly remained an untapped opportunity, Amitabh says collaboration for the same has started. He adds that due to the rocky lunar south pole, knowing the height information of terrain features is as important as the imaging resolution. “We use OHRC stereo images to get four times better height point resolution than LRO,” which really helps safely plan a lander’s last leg of the journey.
At the last annual meeting of the NASA-backed Lunar Exploration Analysis Group (LEAG) in September 2023, LRO project scientist and Science Lead for Artemis III, Noah Petro, reaffirmed this collaborative value by saying:
The Chandrayaan 2 orbiter data is helping build on the LRO foundation by filling important needs, and we’re very much looking forward to more data from the mission!
Some progress was also seen at the 54th Lunar and Planetary Science Conference (LPSC) in 2023, where Wes Patterson of the LRO team collaborating with ISRO SAC scientists described how they’re using complementary radar data from LRO and the Chandrayaan 2 orbiter to uniquely characterize the Artemis III candidate zones. This included getting valuable information on landing hazards within those sites, better access to their permanently shadowed regions than optical imagers, and gaining a broad sense of the physical states of the regions from inferred physical properties.
At the 55th LPSC last week, signs of such work continued as lunar researchers presented use of Chandrayaan 2 orbiter data to help downselect areas within the Artemis III candidate zones via infrared and radar measurements, the former to help find spots with water ice and the latter to help reduce false positives from terrain having rough textures.
This story is excerpted and adapted from my article on precision Moon landings and the future.